使用 DL950 測量正交電流和直流電流 (Id/Iq)

介紹
本應用筆記提供了電機磁場定向控制相關測量的指導,並通過一個示例用例,演示瞭如何使用橫河電機測試與測量系列 DL950 示波記錄儀上的/MT1選件進行測量。本應用筆記特別介紹了應用弱磁措施的表面貼裝永磁馬達的直流電流和正交電流測量。文中討論的技術也適用於其他磁場定向控制變數、演算法和馬達技術。
背景
馬達控制器(逆變器)採用磁場定向控制 (FOC) 來簡化多相馬達的管理,其原理是在輸入端應用直流控制模型,從而簡化複雜的交流換向輸出。這種方法使逆變器的比例積分 (PI) 控制迴路能夠有效地調節選定的非時變直流變量,並將交流馬達視為直流馬達。對於繞線直流電機,其由負責磁通磁化的定子繞組和用於產生扭矩的電樞繞組組成,FOC 透過操縱模擬繞組電流來控制扭矩和轉速。
永久磁鐵馬達的轉子本身俱有磁場,該磁場由安裝在轉子表面或內部的磁鐵產生。透過向定子繞組施加交流電流,可產生旋轉磁場,促使轉子追蹤定子。對於 FOC,定子電流通常以極座標表示,其中縱軸表示正交電流,橫軸表示直流電流。電角或負載角 (θ) 表示定子電流與正交軸或直軸之間的夾角,該夾角表示轉子和定子磁場的位移。
對於表面貼裝永磁 (SMPM) 電機,正交方向 (Iq) 的電流部分產生的扭矩相當於直流電樞電流,而直軸上的負電流 (Id) 會減少扭矩,類似於直流磁化電流。為了優化此類馬達的扭矩,應將定子電流與直軸成 90 度角,以確保沒有直軸電流 (Id = 0),且正交方向的定子電流為滿電流。
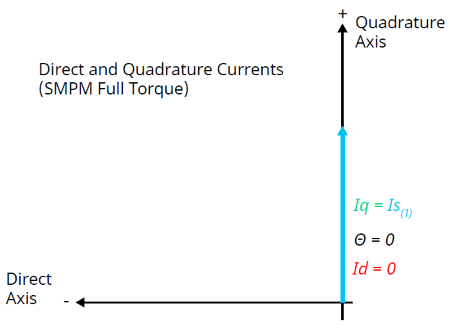
圖 1. 全扭矩,Id=0。
用戶可以選擇以更高的速度運行電機,但這有犧牲扭矩輸出的風險。在這種情況下,逆變器會受到轉子磁通產生的反電動勢 (BEMF) 的限制。當 BEMF 接近直流電源總線電壓或受到元件限制(例如,電容器電壓或導體尺寸)的限制時,就會出現這種限制。為了減輕 BEMF 的影響,採用了一種稱為磁場削弱的策略,即使定子磁通與轉子磁通相反,以減少氣隙中的總磁通。如果使用 SMPM 電機,則可以透過施加負直流電流來改變定子電流相對於轉子位置(參考直軸或交軸)的負載角來實現這種減弱。
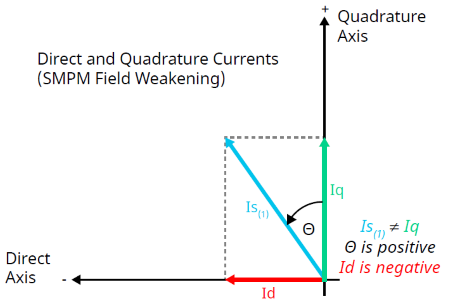
圖 2. SMPM 磁場減弱下的負 Id。
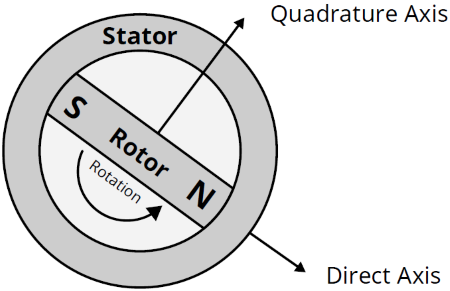
圖 3. 雙極馬達直軸和交軸的直觀表示。
馬達控制中的 Id、Iq
馬達控制器可對電壓、電流和轉子位置進行瞬時測量,並即時計算直流電流和正交電流。 PI 控制器利用直流值與使用者或演算法定義的設定值進行比較。然後計算誤差項,並對電壓訊號進行相應的校正。
在根據相電流瞬時值和轉子位置確定直流電流和正交電流計算公式時,克拉克變換和帕克變換的應用至關重要。克拉克變換有助於透過靜止參考系中的兩相正交變數(α和β)來表示三相繫統。帕克變換結合這些變數以及轉子位置(電角度θ),計算以旋轉參考係為參考的直流電流和正交電流。圖4中的馬達控製圖展示了這些測量值、相關波形以及克拉克變換和帕克變換的範例公式。
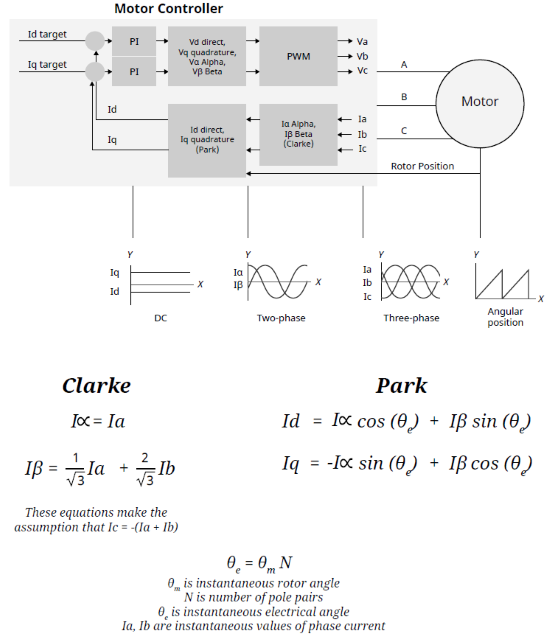
圖 4.半導體製造商提供的微控制器庫中常用的範例簡化方程式。
感測要求
要計算直流電流和正交電流,儀器必須測量相電流和轉子的機械位置。相電流通常使用電流探頭、電流互感器或直接儀器輸入來測量,而轉子的機械位置則透過為馬達配備旋轉編碼器或旋轉變壓器來確定。這些設備通常嵌入馬達本身,或添加到測功機的馬達或負載馬達側。儀器必須能夠評估電流的瞬時值和相位,並根據原始感測器訊號計算位置資訊和位移。
了解編碼器/旋轉變壓器對準
為了了解定子電流 (Is) 的相對角度位置並計算 Id 和 Iq 分量,需要測量轉子軸的位置。此位置的精度取決於感測器本身相對於轉子軸(直軸)的安裝方式。理想情況下,感測器位置直接參考直軸或交軸。然而,在測試情況下手動安裝感測器可能不可行,因此必須在 Id 和 Iq 計算中進行補償。
感測器對準的一種補償方法是將其位置資訊與馬達空載旋轉(即斷開逆變器和空載軸)時的 BEMF 電壓進行比較。空載時,Id 和 Iq = 0,BEMF 電壓波形的過零點可作為參考。 BEMF 訊號的峰值相電壓出現在與轉子直軸對齊時,而 BEMF 訊號的過零點出現在與轉子交軸(90 度)對齊時。
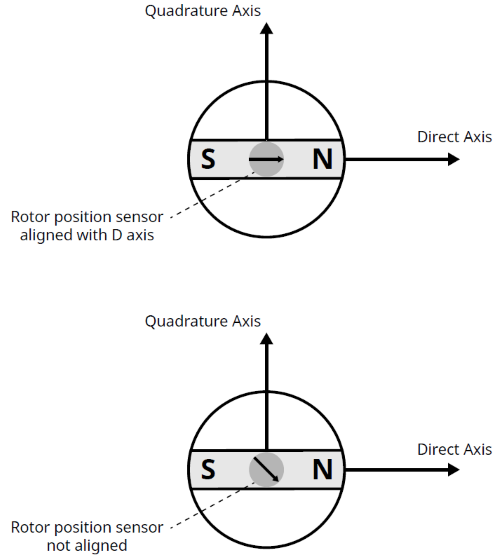
圖 5. 感測器相對於轉子位置的方向。
需要注意的是,如果使用線電壓測量 BEMF,由於三角形連接中相電流和相電壓之間存在角度間隔,因此必須額外添加 30 度偏移(請參閱三角形接線電壓表的向量圖)。除了任何額外的位移(例如與 z 脈衝的零交叉)外,還應將此 30 度偏移作為校正值編程到儀器中。
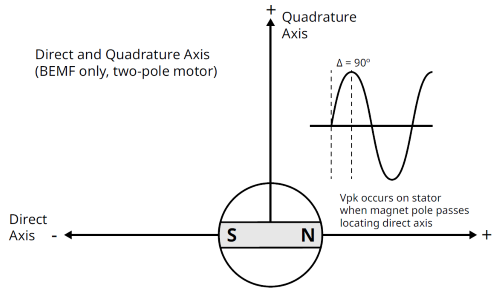
圖 6. 相對於 BEMF 電壓的直軸和交軸。
校準偏移的另一種方法是在專用於儀器儀表的測功機上安裝編碼器或旋轉變壓器。在此配置中,角度偏移設定在z脈衝和q軸之間,此時馬達處於負載狀態,並由逆變器使用其自身的位置回授裝置(例如編碼器、旋轉變壓器、霍爾效應電路、鎖相迴路)驅動。當逆變器、馬達、儀器儀表以及編碼器或旋轉變壓器連接並運作時,逆變器需要一個正交電流和一個零直流電流(Iq > 0,Id = 0)。這會將感測器的參考點定位到逆變器已知的正交軸上,這意味著直軸與正交軸成90度角。
這也可以補償馬達控制器(每次啟動時都會進行校準),並有效地移動逆變器的參考點,這可以是A和B脈衝的偏移計數,而不是z脈衝。圖7顯示了一個使用編碼器z脈衝的範例。
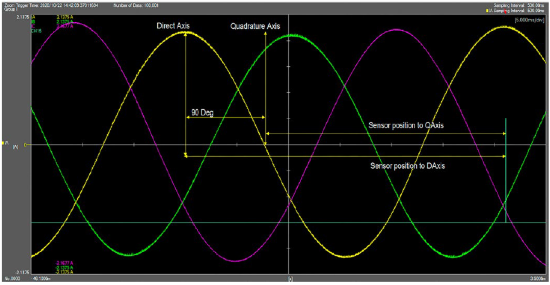
圖 7. 當逆變器指令為 Id=0 時,負載相 A 下編碼器 z 脈衝與 q 軸和 d 軸偏移的範例。
ScopeCorder 計算
DL950 示波記錄器是一款混合型儀器,它連接了示波器和資料擷取工具,提供串流和觸發波形,並擁有豐富的輸入類型和專為機電一體化系統量身定制的高階運算功能。其獨特之處在於其/MT1功能可進行即時數學計算。利用此功能,訊號可直接在A/D轉換器上進行乘法運算,從而同時擷取原始資料和計算資料。
值得注意的是,這些計算是基於輸入訊號進行的,而不是像傳統示波器那樣基於捕獲的波形。這種區別使得能夠在即時數學通道上實現觸發。在計算直通和正交分量時,DL950 示波記錄器擅長即時計算 FOC 參數,並計算關鍵指標,例如電角度、馬達功率訊號以及正交和直通向量。確定 Id 和 Iq 的計算結構源自於克拉克·帕克定理。
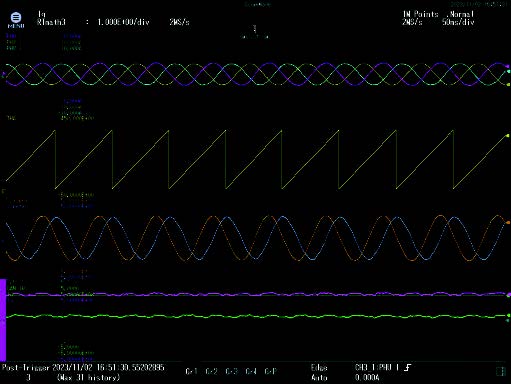
圖 8. 此圖顯示了瞬時電流波形、電角度、Clarke 變換和 Park 變換,從而計算出 Id 和 Iq。圖中也顯示了來自 VCU 的 CAN 控制訊號 Id 和 Iq 的趨勢圖。
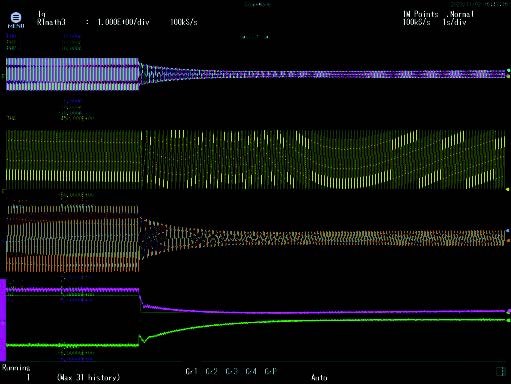
圖 9.此圖顯示了 Id 和 Iq 相對於 VCU 指定的 CAN 值的響應的更大時間尺度。
Id 和 Iq 分析設置
DL950 ScopeCorder 上的/MT1選購品簡化了 FOC 測量的配置和分析。使用者可以輕鬆選擇電壓和電流通道、配置位置感測器轉換,並輸入特定於被測馬達的常數參數。
步驟 1在應用程式
視窗中 選擇馬達分析(/MT1)選項。
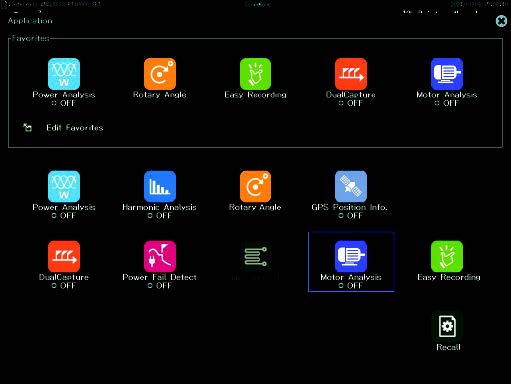
圖 10. /MT1 選項視圖。
步驟2
選擇適當數量的馬達系統進行分析。
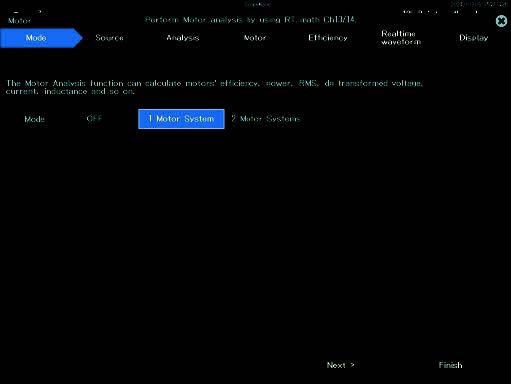
圖 11.馬達系統選擇選項。
步驟3:
選擇適當的接線方案、對應的電壓和電流訊號,選擇輸入並配置馬達通道。如適用,也可設定直流電源。
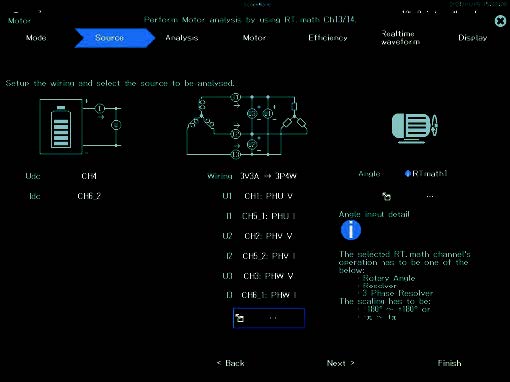
圖 12.來源選項的初始視圖。
步驟 4
使用角度設定配置位置感測器。將開啟一個彈出窗口,顯示可供選擇的位置感測器類型(例如,ABZ 編碼器或旋轉變壓器)。對於每種配置,選擇需要分析的通道以及表示電角度所需的倍增係數。退出彈出視窗即可顯示更新後的感應器配置。
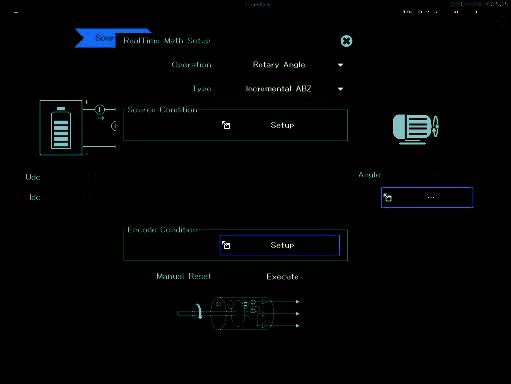
圖 13.配置位置感測器。
步驟 5
使用「分析」選單,根據用於確定功率計算時間基準的同步訊號指定計算週期。此訊號源還可以被濾除,以有效去除可能調製過零點的高頻成分。此視圖中的其他選項可讓使用者定義功率計算分析類型、均方根類型、角度刻度、無功功率公式,並使用積分設定來確定功耗測量的時間基準。
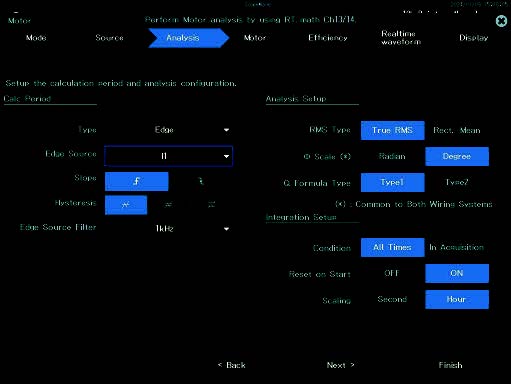
圖 14.指定計算週期。
步驟 6
輸入馬達和位置感測器的常數、極數、磁鏈(韋伯)和繞組電阻(歐姆),然後確定轉速是以 RPM 還是頻率(赫茲)輸出。接下來,選擇執行基本面分析或是功率不變量分析。基本面分析僅使用基頻(功率驅動頻率)進行馬達和功率計算,而功率不變量分析則透過將訊號縮放 sqrt(2/3) 倍來補償線間電壓測量。
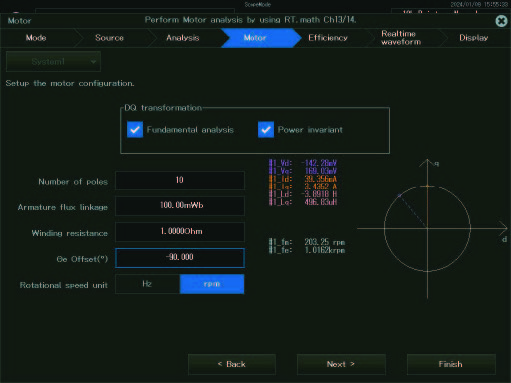
圖 15.「馬達」標籤視圖,其中輸入常數、極數等。
步驟7
輸入θe偏移量,即馬達輸入訊號與位置訊號下降沿的電角度偏移。
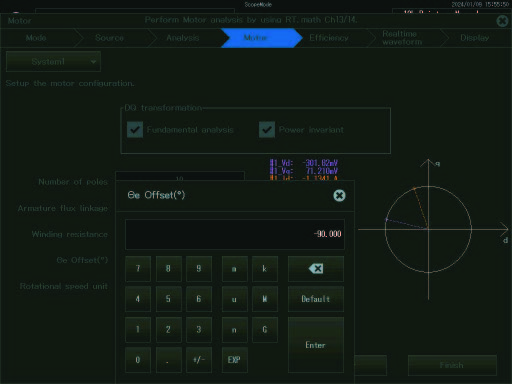
圖 16.在「馬達」標籤視圖中確定 θe 偏移。
步驟 8
座標平面現在描繪電壓和電流向量,並顯示正交平面和直接平面中的電壓、電流和電感值,以確保適當的配置。
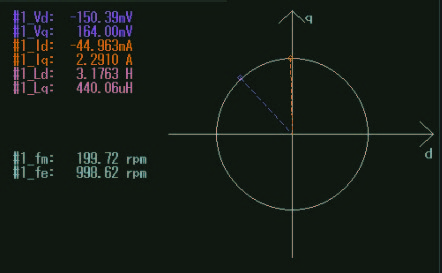
圖 17.從使用者輸入產生的座標平面的範例。
步驟 9
配置效率測量以顯示在組件和系統層級可以發現的損失,然後設定用於機械功率計算的扭力訊號,可以是縮放的類比訊號或提供扭力值的解碼頻率訊號。
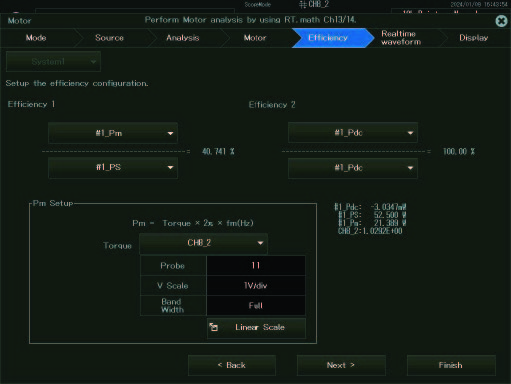
圖 18.“效率”選項卡視圖。
步驟 10
在「即時波形」選單中,選擇要輸出為即時數學通道(取樣率高達 10MS/s)的 DQ 和 delta-star 計算。此操作可利用即時數學資源,並實現更高的分析解析度。
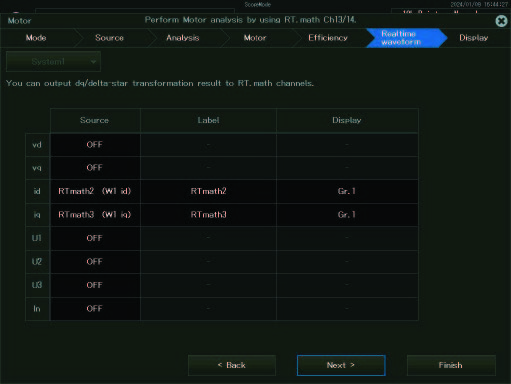
圖 19.即時波形標籤的視圖。
步驟 11
要完成 FOC 和馬達分析的設置,請在「顯示」選單中選擇並繪製馬達和功率測量的趨勢圖。這將提供輸入訊號的數位萬用電錶讀數,並幫助使用者確定哪些訊號需要開啟並進行趨勢分析,以便進行進一步分析。

圖 20. 使用 /MT1 選項的範例 Id 和 Iq 測量結果。
結論
橫河電機測試與測量部門的 DL950 示波記錄器配備的/MT1選件,簡化了 FOC 測量和電機參數的設定和分析。 /MT1選購品易於使用,使用戶能夠專注於實際測量,而無需將寶貴的時間浪費在繁瑣的設定步驟上,從而更有效率地從馬達系統中獲取有價值的資訊。